Kulkarni, Padmaja and Kober, Jens and Babuska, Robert and Della Santina, Cosimo, Learning Assembly Tasks in a Few Minutes by Combining Impedance Control and Residual Recurrent Reinforcement Learning , Advanced Intelligent Systems, 4 (1), 2100095, 2022. [DOI] [PDF] [Video]
Cognitive Robots for Flexible Agro Food Technology (FlexCRAFT)
Abstract:
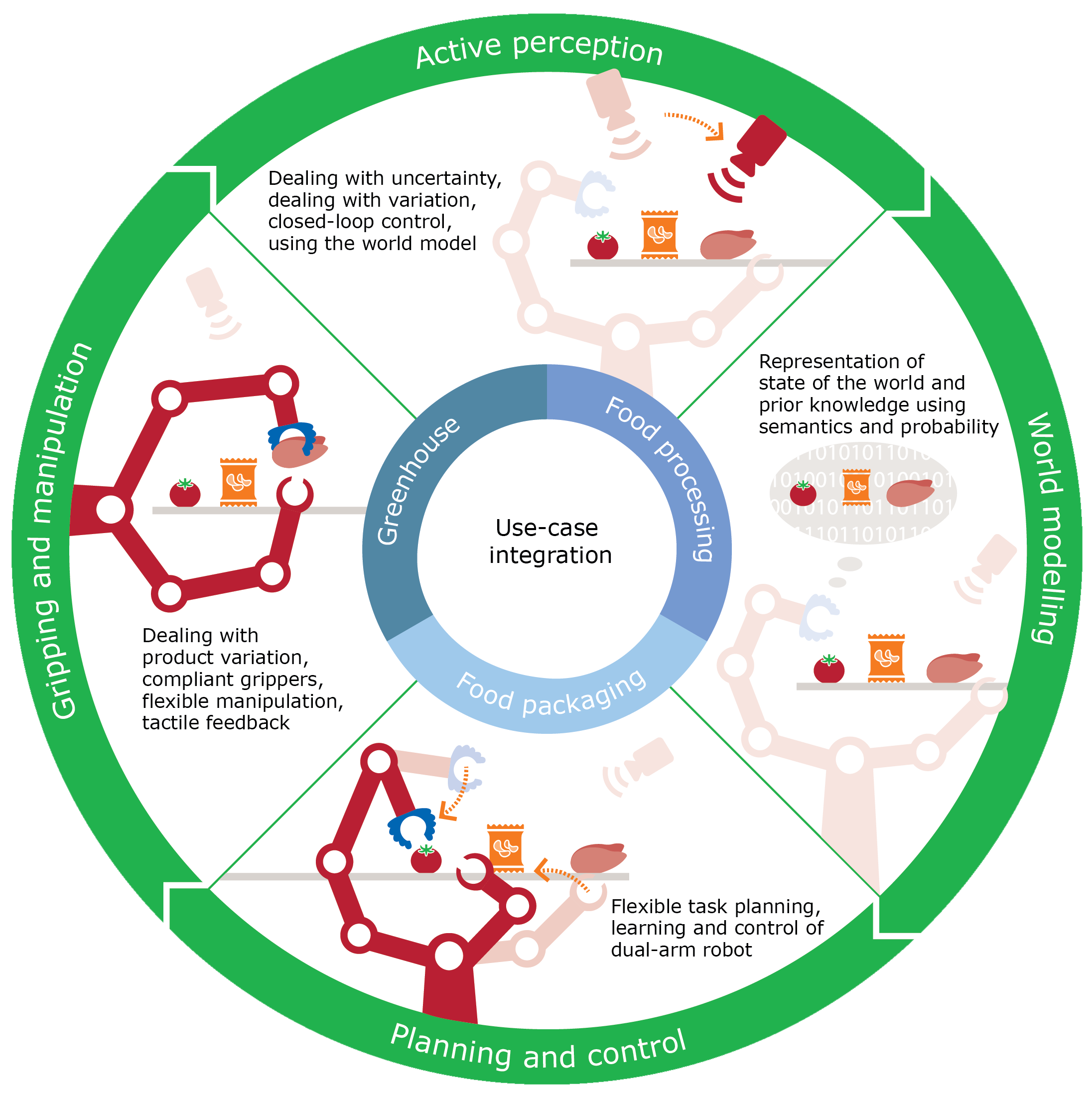
Food production must be as hygienic, efficient and sustainable as possible. Furthermore, fewer people are willing to do tedious and heavy work in warm greenhouses or in refrigerated rooms where chicken products are processed, for example. Robots can provide a solution to this problem if they can deal with the considerable variations in shape, size and hardness of different food products. This is still challenging. The programme FlexCRAFT will develop new robot technology for such purposes as the automatic harvesting of tomatoes, for example. The robotics developed must also help with the processing of foodstuffs. Examples of this include the processing and packaging of chicken products, but also neatly packaging bags of crisps and packets of biscuits in boxes of varying sizes.
The Netherlands is the second biggest exporter of agro-food products worldwide and the third biggest supplier of technology for the agro-food sector. This programme will contribute to strengthening the competitive position of the Netherlands in these sectors.
Project Type: NWO Perspectief; 2019-2022
Consortium: 3DUniversum, ABB, AgriFoodTech Platform, Aris BV, BluePrint Automation, Cellar Land, Cerescon, Delft University of Technology, Demcon, Eindhoven University of Technology, Festo, GMV, Houdijk Holland, Marel Stork Poultry Processing, Maxon Motor, Priva, Protonic Holland, Rijk Zwaan, University of Amsterdam, University of Twente, Wageningen University & Research
Members: ir. Padmaja Kulkarni , ir. Rodrigo J. Pérez-Dattari , Dr.-Ing. Jens Kober , prof.dr. Robert Babuška
Publications
Kulkarni, Padmaja and Babuska, Robert and Kober, Jens, Tactile-based Self-supervised Pose Estimation for Robust Grasping , International Symposium on Experimental Robotics (ISER), 277--284, 2021. [DOI] [PDF]
Kulkarni, Padmaja and Kober, Jens and Babuska, Robert and Della Santina, Cosimo, Learning Assembly Tasks in a Few Minutes by Combining Impedance Control and Residual Recurrent Reinforcement Learning , Advanced Intelligent Systems, 2021. [DOI] [PDF] [Video]
Perez-Dattari, Rodrigo and Celemin, Carlos E. and Franzese, Giovanni and Ruiz-del-Solar, Javier and Kober, Jens, Interactive Learning of Temporal Features for Control: Shaping Policies and State Representations From Human Feedback , IEEE Robotics & Automation Magazine, 27 (2), 46--54, 2020. [DOI] [PDF] [Video] [Code]