Zhu, Jihong and Cherubini, Andrea and Dune, Claire and Navarro-Alarcon, David and Alambeigi, Farshid and Berenson, Dmitry and Ficuciello, Fanny and Harada, Kensuke and Kober, Jens and Li, Xiang and Pan, Jia and Yuan, Wenzhen and Gienger, Michael, Challenges and Outlook in Robotic Manipulation of Deformable Objects , IEEE Robotics & Automation Magazine, 2022. [PDF] [Website]
Learning Physical Human-Robot Cooperation Tasks
Abstract:
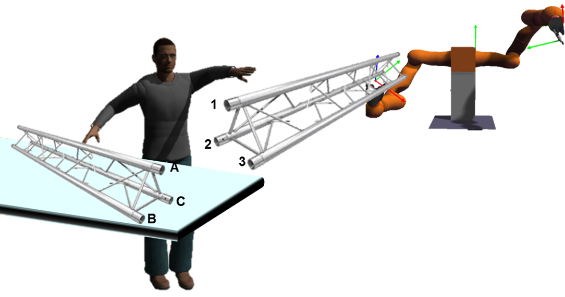
Human-robot interaction and collaboration is of fundamental importance for any robot leaving the safety of fences on a highly-structured factory floor: service and care scenarios, medical applications, offshore, maintenance and inspection, as well as industrial assembly. In this project, we will develop new concepts and techniques for robot learning that endow robots with the capability to physically interact and collaborate with humans. In particular, we will consider tasks related to joint handling of large objects, i.e., jointly transporting and manipulating them. Examples include transporting and assembling light traverses, or changing tires on a car.
Project Type: Industry project (Honda Research Institute Europe GmbH, HTSM PPS-toeslag); 2017-2021
Members: ir. Linda van der Spaa , Dr. Jihong Zhu , Dr.-Ing. Jens Kober , Dr.-Ing. Michael Gienger
Publications
van der Spaa, Linda F. and Bates, Tamas and Gienger, Michael and Kober, Jens, Predicting and Optimizing Ergonomics in Physical Human-Robot Cooperation Tasks , IEEE International Conference on Robotics and Automation (ICRA), 1799--1805, 2020. [DOI] [PDF] [Video]
Gienger, Michael and Ruiken, Dirk and Bates, Tamas and Regaieg, Mohamed and Meissner, Michael and Kober, Jens and Seiwald, Philipp and Hildebrandt, Arne-Christoph, Human-Robot Cooperative Object Manipulation with Contact Changes , IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 1354--1360, 2018. [DOI] [PDF] [Video]
Bates, Tamas and Kober, Jens and Gienger, Michael, Head-tracked off-axis perspective projection improves gaze readability of 3D virtual avatars , SIGGRAPH Asia Technical Briefs, 29:1--29:4, 2018. [DOI] [PDF]